At present, only one major element of DAVE-ML has been defined: the function definition element, or DAVEfunc. DAVEfunc is used to describe static models such as aerodynamic and inertia/mass models, where an internal state is not included.
Other major elements are envisioned to describe dynamic portions of the vehicle model (such as propulsion, alighting gear, control systems, etc.) and check case data. Ultimately DAVE-ML should be capable of describing a complete flight dynamics model with sufficient data to validate the proper implementation thereof.
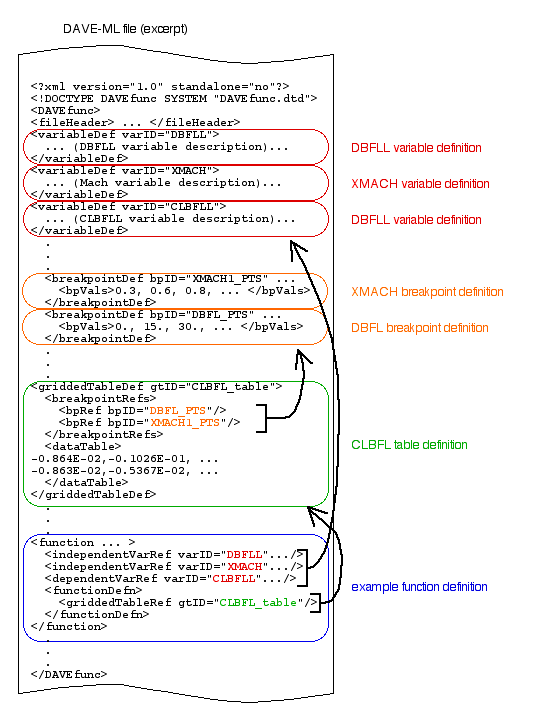
The DAVEfunc element contains both data tables and equations for a particular vehicle subsystem model, for example, the aerodynamic model or the mass/inertia model. A DAVEfunc element is broken into roughly five components: a file header, variable definitions, breakpoint definitions, table definitions, and function definitions. This decomposition reflects common practice in engineering development flight simulation models in which the aerodynamic database is usually captured in multidimensional, linearly interpolated function tables. The input to these tables are usually state variables of the simulation (such as Mach number or angle-of-attack). The outputs from these interpolated tables are combined to represent forces and moments acting on the vehicle due to aerodynamics.
It is possible, using DAVEfunc and MathML elements, to completely define an aerodynamic model without use of function tables (by mathematical combinations of input variables, such as a polynomial model) but this is not yet common in the American flight simulation industry.
A fileHeader element is included to give background and reference data for the represented model.
Variables, or more properly signals, are used to route inputs, calculations and outputs through the subsystem model. Each variable is defined with a variableDef element. Variables can be thought of as parameters in a computer program, or signal paths on a block diagram. They can be inputs to the subsystem model, constant values, outputs of the model, and/or the results of intermediate calculations. Variables must be defined for each input and output for any function elements as well as any input or output of the subsystem represented. MathML content markup can be used to define constant, intermediate, or output variables as mathematical combination of constant values, function table outputs, and other variables. MathML presentation markup can also be used to define the symbol to use in documentation for each defined variable. Variables also represent the current value of a function (the dependentVariableDef in a function definition) so the output of functions can be used as inputs to other variables or functions.
Breakpoint definitions, captured in breakpointDef elements, consist of a list of monotonically-increasing floating-point values separated by commas. These sets are referenced by "gridded" function table definitions and may be referenced by more than one function definition.
Function table definitions, described by griddedTableDef and ungriddedTableDef elements, generally contain the bulk of data points in an aero model, and typically represent a smooth hypersurface representing the value of some aerodynamic non-dimensional coefficient as a function of one or more vehicle states (typically Mach number, angle of attack, control surface deflection, and/or angular body rates). These function tables can be either "gridded," meaning the function has a value at every intersection of each dimension's breakpoint, or "ungridded," meaning each data point has a specified coordinate location in n-space. The same table can be reused in several functions, such as a left- and right-aileron moment contribution.
Finally, function definitions (described by function elements) connect breakpoint sets and data tables to define how an output signal (or dependent variable) should vary with one or more input signals (or independent variables). The valid ranges of input signal magnitudes, along with extrapolation requirements for out-of-range inputs, can be defined. There is no limit to the number of independent variables, or function dimensionality, of the function.
Figure 1 contains excerpts from an example model, showing the major parts of a DAVE-ML file.
A simpler version of a function is available in which the dependent variable breakpoint values and dependent output values are specified directly inside the function body. This may be preferred for models that do not reuse function or breakpoint data.
A third form of function is to give the gridded table values or ungridded table values inside the function body, but refer to externally defined breakpoint sets. This allows reusability of the breakpoint sets by other functions, but keeps the table data private.